

基于脑电-肌电的多模态电生理系统
目录
1.引言
1.1.编写目的
本文档主要用于脑-肌电系统的搭建和功能性说明,以便为后续的实验设计打下坚实的基础。
本文档的预期读者是与脑肌电系统开发有关的决策人,项目承担者,技术开发人员,辅助开发者,软件验证者。
1.2.背景
人体活动细胞或组织不论在静止状态还是活动状态,都会产生与生命状态密切相关的、有规律的电现象,称为生物电。通过高精度微弱生物电信号采集技术,可以采集到人体的各类电生理信号,包括脑电、肌电、心电等,并对得到的数据进行分析、存储。本文档将主要介绍结合脑电与肌电的多模态电生理系统的搭建及主要应用。
脑电是所有生物电信号中最为微弱,采集难度最高的信号,包含了大量脑神经细胞的电生理活动信息,可以体现人的思维活动和肢体动作等信息。科研领域所说的一般是指头皮脑电,是大脑皮层的电信号透过颅骨和头皮,弥散到头皮的电信号,因此信号强度微弱,且噪声干扰大。
肌电信号是众多肌纤维中运动单元动作电位在时间和空间上的叠加。人体的神经肌肉活动伴随着相应电生理信号的释放。因此表面肌电信号能在一定程度上反映神经肌肉的活动。
结合脑肌电的多模态电生理系统应用十分广泛。近年来,运用脑电与肌电信号的协同分析考察神经肌肉活动状态成为运动医学、康复工程和人机交互等领域的研究热点。
1.3.多模态电生理系统的应用领域
基于脑肌电的多模态电生理系统主要包括以下应用:
1. 多模态脑-机接口系统/康复工程;
2. 状态监测;
3. 脑电和肌电的相干性分析。
2. 系统概述
由于脑电信号和肌电信号具有各自的特点,可以应用于不同的领域;同时二者又有相关性,因此将脑肌电结合做一些电生理机制的研究,并且应用于康复工程和电生理控制领域便成为很好的结合点。本方案将主要介绍基于脑肌电的多模态电生理系统的应用及对应的实现方法。
脑-机接口是通过采集并分析脑电等生物电生理信号,得到人的主观意图,并将其转化为外部设备的控制信号,在人脑与外部设备之间建立直接的连接通路。脑-机接口系统一般应用于脑-机交互和康复工程等领域,利用脑-机接口操控军事设备也是近年来各国军方的热门研究课题之一。其精确控制需要几个方面的条件:系统功能和技术参数达到一定标准;体积小巧(最好可以实现便携式佩戴);抗干扰能力强,以适应各类复杂特殊的实验环境;具备稳定高效的实时在线系统等。
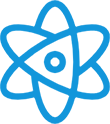
肌电信号也可用于控制外部设备。因为不同手势会运用到不同的手臂肌肉组织,运动的生物肌肉组织会产生微弱的(低至毫伏级)电位变化,而这种表面肌电信号可以被传感器采集到(信号采集)。所以,如果在可穿戴设备上预先定义几种不同的手势,就可以根据手臂肌肉电流信号识别各种手势(模式判断),最后通过特定的算法把各种手势解析成不同的机器命令,并实现对设备的控制。除了识别电信号的肌电传感器之外,这种方案还会配置一些多轴传感器,以更精确的实现多种手势的识别。传感器加得越多,识别精度越高,不过功耗和运算难度也会相应的增加。
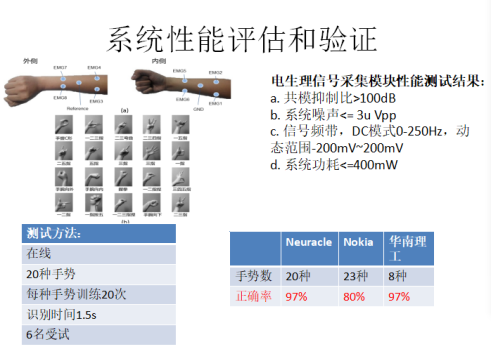
图 1 基于表面肌电的手势识别系统评估
单独使用基于EMG的控制方法在一些特殊情况下具有某些不足。例如在用户不能产生足够强度的肌肉信号的情况下,基于EMG的控制方法不能独立使用;由于难以从瘫痪肢体的肌肉获得控制信号,一些上肢完全瘫痪的人可能无法使用诸如外骨骼等的装置。基于EEG的控制方法则会面临着诸如可靠性低,准确度低,用户适应性低和数据传输率低等困难,因此结合EEG和EMG各自的优势,并可以补偿其各自的劣势,构建一种多模态电生理控制系统是较为理想的解决方案。
人机交互系统平台包括电信号的采集与传输,信号在线分析,控制命令输出等功能。而便携式的人机交互系统将传统人机交互系统中的信号采集、信号分析、指令控制等各模块实现了便携化、可穿戴设计,让使用者能够在日常生活场景中也能够使用人机交互系统,极大地拓展了人机交互系统的应用场景。
该系统的关键是同步精度,如果同步精度无法达到要求,整个在线系统准确性将无法得到保证,其本应发挥的作用将不复存在。本系统的脑电信号与刺激信号的同步精度在1ms,以保证人机交互系统能够精确稳定的运转。将脑电采集模块和肌电采集模块实现便携化,微型化,可以实现便携式的人机交互系统搭建,该系统可以实现受试者在移动过程中或者户外环境下进行实验。为此我们开发了一种新型的便携式脑电放大器和肌电放大器,兼顾了设备采集信号的高质量和长时程,同时为了满足自然场景下的控制需求,可以实现人机交互系统完全的便携化。
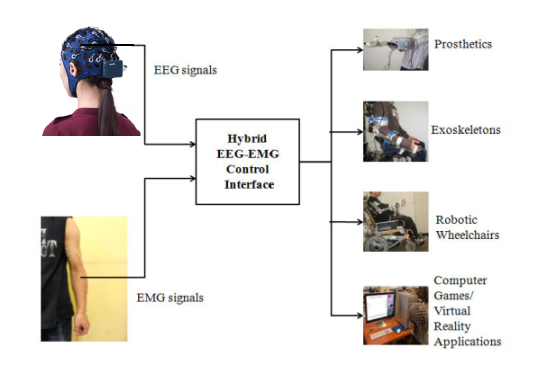
图 2 多模态人机交互系统的应用
脑-肌电混合方法的主要问题之一是难以实现脑电和肌电控制方法的精确集成。甚至有时候混合方法的有效性可能低于单独使用脑电或肌电系统的有效性。为此我们要给两种信号的特征做分类,并采用自适应融合的方式。例如,患有运动障碍的患者可能无法在开始时使用肌电信号移动康复外骨骼,因此可以给予基于脑电的控制方法更高的优先级,保证患者可以在最初的阶段控制这种装置。当用户习惯于这种康复过程时,可以给予基于肌电的控制方法更多的权重。
图 3 人机交互系统脑电与肌电特征信号的结合
3.系统的同步方案
3.1.便携式脑电采集系统
由于目前商用脑电设备普遍体积较大,并不适用于便携式脑-机接口系统实际操控场景的需要,因此我们通过直流耦合式模拟前端对脑电放大器进行了小型化设计,并减少了模拟滤波和放大环节,实现了脑电放大器的小型化。便携式脑电采集放大器及脑-机接口系统在运动状态下的表现出了良好的共放大、信噪比特性和稳定性,在抗运动干扰方面,与电路性能相对占优势的台式脑电采集设备相比,本项目研发的便携式脑电放大器更适合移动状态下的脑-机接口应用。
该脑电采集系统的参数如下:
|
通道数 |
64导 |
|
最高采样率 |
16kHz |
|
共模抑制比 |
≥120dB |
|
模数转换精度 |
24bit |
|
系统噪声 |
<0.4µVrms |
|
输入信号范围 |
±375mVpp |
|
事件同步输入 |
同步,时间精度<1ms |
|
体积 |
85*55*22mm |
|
重量 |
73g |
|
供电方式 |
内部锂电池 |
|
供电时长 |
单块电池达到4小时,可通过多块备用电池增加连续工作时间 |
|
|
|


图 4 64通道脑电采集系统
该放大器具有以下特点:
(1) 便携可穿戴系统设计:该放大器为便携式设备,采用64通道的无线同步数据采集,可实现自然环境下实现的自由移动;配置有九轴运动传感器,可去除被试在移动过程中信号的干扰。
(2) 高质量脑电信号采集:设备具有低输入噪声和高采样率,动态范围广,电磁屏蔽性好,可实现在复杂环境下的数据采集。
(3) 精准事件同步:可实现多设备间数据高精度同步,以及刺激设备和采集设备高精度同步。
3.2.便携式肌电采集系统
我们通过直流耦合式模拟前端对肌电放大器进行了小型化设计,并减少了模拟滤波和放大环节,实现了放大器的微型化。便携式肌电采集放大器在手势识别的范式中表现出了良好的共放大、信噪比特性和稳定性。同时该肌电放大器可以和便携式脑电放大器实现无线精准同步,同步精度<1ms。
3.3.脑-肌电采集软件
脑-肌电采集软件可实现无线放大器采集的脑-肌电等电生理信号,以及多参数同步器采集的同步信号的显示、分析、存储、离线回放等功能。软件可以进行离线阻抗测量,以及在信号采集过程中的实时阻抗监测。电生理信号的时频分析以及一系列特征参数可以通过软件的趋势图分析功能进行实时观测与分析。相关数据可以通过数据接口进行实时传输,供其他软件进行数据整合与分析。
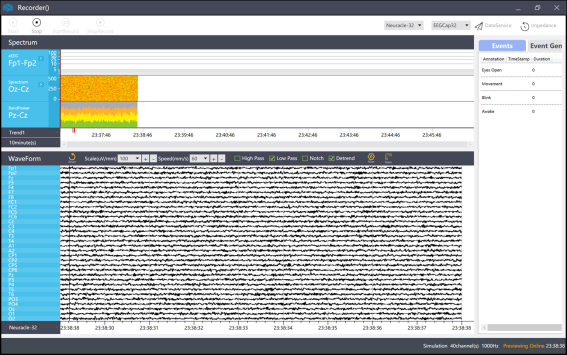
图 5 脑-肌电采集软件界面
3.4.能同步中心
智能同步中心是无线数字脑电采集系统的重要组成部件,也可与其他类型的放大器配合使用。在本方案中,智能同步中心可以保证无线脑电放大器和无线肌电放大器的同步精度<1ms。

图 6 智能同步中心
3.5.同步方案设计
多模态人-机交互系统平台主要包括以下组成部分:
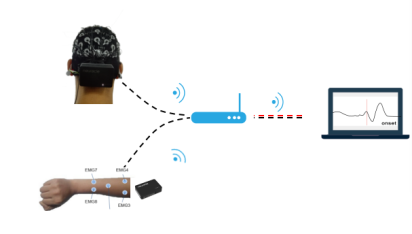
图 7 脑-肌电放大器同步采集
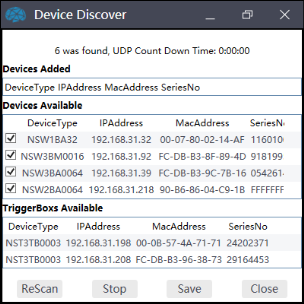
由于脑电放大器和肌电放大器是使用同一套软件,我们打开记录软件之后可以直接搜索到两个放大器,如图8.只要勾选两个放大器就可以同时采集脑电和肌电信号。
图 8 放大器搜索界面
3.6.系统框架设计
该系统主要实现基于脑-肌电的多模态电生理系统,框架如下:
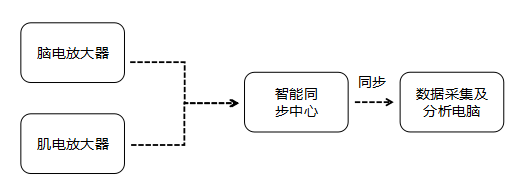
图9 结合脑-肌电的多模态电生理采集系统框架图
脑电放大器佩戴在受试者的头部,实时采取受试者的脑电信号,肌电放大器佩戴在受试者的手臂,实时采取受试者的肌脑电信号,二者同时通过无线传输;智能同步中心将两种数字信号进行同步,同步精度<1ms;再将同步之后的数据发送至电脑进行下一步分析。
3.7.关键技术和解决途径
无线脑电/肌电采集
生物电信号,尤其是脑电等微弱生物电信号,由于其幅值微弱,淹没在周围各类电磁干扰信号中,因此对信号采集前端的精度与抗噪声能力要求很高。同时系统需要在可佩带的体积内实现。
为满足高精度弱信号采集的要求,系统采用低增益放大结合完全数字滤波的无损宽频直流耦合技术。较传统方案相比,该技术能够实现对宽频带信号的高精度采集,与传统方案相比,电路体积能够减小85%以上。
脑肌电融合的人机交互系统
脑电的控制方法则会面临着诸如可靠性低,准确度低,用户适应性低和数据传输率低等困难,肌电的控制方法信息传输率高,但是面临着某些特殊人群的低正确率,或者是肌肉震颤带来的干扰等。因此结合EEG和EMG各自的优势,并可以补偿其各自的劣势,构建一种多模态电生理控制系统是较为理想的解决方案。
系统同步
实现便携式的人机交互系统要求两点:一是系统脱离实验室环境内的限制,可以在受试者更自然的状态下实现人机交互。二是二者的精确同步,为此我们开发了一种无线同步技术,通过智能同步中心可以实现二者小于1ms的同步精度。
3.8.系统特点总结
本项目所采用的便携式人机交互系统具有以下特点:
(1)本系统研发的无线脑电放大器和无线肌电放大器具有便携可穿戴的特点,同时具有高信号质量和电磁屏蔽性好的特点,可以在自然环境下使用并且信号不受环境影响;
(2)本系统融合了脑电和肌电的特点并加以融合,可实现高速准确和高速的控制命令输出;
(3)本系统可以实现精确同步,同步精度<1ms。

